![]()
T60-IO 闭环步进驱动器
用户手册
深圳市睿智机电科技有限公司
产品结束view
感谢您选择 Rtelligent T 系列数字步进伺服驱动器。 步进伺服是在普通开环步进电机的基础上,结合位置反馈和伺服算法形成的步进电机方案,具有高速、高扭矩、高精度、低振动、低发热、不丢步等特点。
T系列步进伺服驱动器基于TI全新的32位DSP处理芯片平台,在伺服驱动器中采用磁场定向控制(FOC)和矢量弱磁控制算法,在各方面都具有超越普通步进电机的性能。
- 内置PID参数调节功能,使电机更好地满足各种负载的应用。
- 内置弱磁控制算法,使电机降低磁场特性,保持高速供电。
- 内置电流矢量控制功能,使电机具有伺服、低发热的电流特性。
- 内置微步指令算法,使电机在各种速度下都能在保持稳定低振动的同时运行。
- 内置4000脉冲分辨率的编码器反馈,使定位精度提高,永不丢步。
综上所述,伺服控制方案结合步进电机的特点,使T系列步进伺服驱动器能够更好地发挥步进电机的性能,可替代同等功率的伺服应用。 是自动化设备最优性价比的新选择。
T60-IO驱动可以通过拨码开关和调试软件设置细分等参数。 具有卷等保护功能tage、电流和位置,并增加报警输出接口。 它的输入和输出控制信号是光隔离的。
| 电源 | 24 –50 伏直流 |
| 控制精度 | 4000 脉冲/转 |
| 电流控制 | 伺服矢量控制算法 |
| 速度设置 | 拨码开关设置,或调试软件设置 |
| 速度范围 | 常规1200~1500rpm,最高可达4000rpm |
| 共振抑制 | 自动计算共振点,抑制中频振动 |
| PID参数调整 | 调整电机PID特性的测试软件 |
| 脉冲滤波 | 2MHz数字信号滤波器 |
| 报警输出 | 过流、过压报警输出tage、位置误差等 |
我们希望我们性能卓越的产品能够帮助您顺利完成运动控制程序。 请在使用产品前阅读本技术手册。
应用环境及安装
环境要求
| 物品 | 智能T60-IO |
| 安装环境 | 避免灰尘、油污和腐蚀性环境 |
| 振动 | 0.5G(4.9m/s2)最大 |
| 工作温度/湿度 | 0℃ ~ 45℃ / 90% RH 以下(无结露) |
| 储运温度: | -10℃~70℃ |
| 冷却 | 自然冷却/远离热源 |
| 防水等级 | IP54 |
驱动器安装尺寸

驱动安装要求
请将驱动器垂直或水平安装,正面朝前,顶部朝上,以利于散热。
组装时,应避免钻头等异物掉入驱动器内部。
组装时请使用M3螺丝固定。
当安装位置附近有振动源(如钻机)时,请使用减振器或防振橡胶垫圈。
当控制柜内安装多个驱动器时,请注意预留足够的空间,以保证足够的散热。 必要时可配置散热风扇,保证控制柜内良好的散热条件。
驱动程序端口和连接
端口功能说明
| 功能 | 年级 | 定义 | 评论 |
| 电源输入 | V+ | 输入到直流电源正极 | 直流 24-50 岁 |
| V- | 输入到直流电源的负极 | ||
| 电机连接 | A+ | A相绕组正极 | 红色的 |
| A相绕组负极 | 黄色的 | ||
| B+ | B相绕组正极 | 黑色的 | |
| B- | B相绕组负极 | 绿色的 | |
| 编码器连接 | EB+ | 编码器B相正极 | 绿色的 |
| EB- | 编码器B相负端 | 黄色的 | |
| EA+ | 编码器A相正极 | 棕色的 | |
| EA- | 编码器A相负端 | 白色的 | |
| 电压控制电路 | 编码器工作电源5V正极 | 红色的 | |
| 地线 | 编码器工作电源5V接地端 | 蓝色的 | |
| 10 连接 | 普尔+ | 斯坦输入接口 | 24V电平 |
| 普尔- | |||
| 方向+ | 方向输入接口 | ||
| 目录- | |||
| 启用终端 | 艾纳+ | 启用控制界面 | |
| ENA- | |||
| 报警输出 | 警报器+ | 报警输出接口 | 24V,40mA以下 |
| ALM- |
电源输入
驱动器电源为直流电源,输入电压为tage范围在24V~50V之间。
不要误将市电 220VAC 直接接在 AC 的两端! ! !
电源选择参考:
卷tage:
步进电机具有转矩随电机转速的增加而减小的特点,输入电压tage 会影响 amp高速转矩降低幅度。 适当增加音量tag输入电源的e可以增加电机高速时的输出扭矩。
步进伺服比普通步进具有更高的速度和扭矩输出。 因此,要想获得更好的高速性能,就需要提高供电电压tage 司机。
当前的:
驱动器的工作过程是将输入的高音量tage和低电流电源进入低音量tage和电机绕组两端的大电流。 在实际使用中,应根据电机型号、负载转矩等因素选择合适的电源。
再生卷的效果tage:
步进电机在工作时,还保留了发电机的特性。 减速时,负载所积累的动能会转化为电能,叠加在驱动电路和输入电源上。
注意加减速时间的设置,以保护驱动器或电源。
当驱动器断电时,当负载拉动使电机运动时,您会看到驱动器的 LED 指示灯亮,这也受此影响。
编码器连接
T60-IO编码器为A/B差分输出,使用时按相应顺序连接。
| EB+ | EB- | EA+ | EA- | 电压控制电路 | 地线 |
| 绿色的 | 黄色的 | 棕色的 | 白色的 | 红色的 | 蓝色的 |
Rtelligent配备一定长度的编码器电缆,请根据安装需要购买不同长度的延长电缆。
电机连接
T60-IO驱动器配套的电机为对应的T系列步进伺服电机,其对应的电机接线顺序固定且唯一。

| A+ | 红色的 |
| A- | 黄色的 |
| B+ | 黑色的 |
| B- | 绿色的 |
控制信号连接
PUL、DIR 端口:用于启动和停止命令的连接
| 开始和方向指示 | 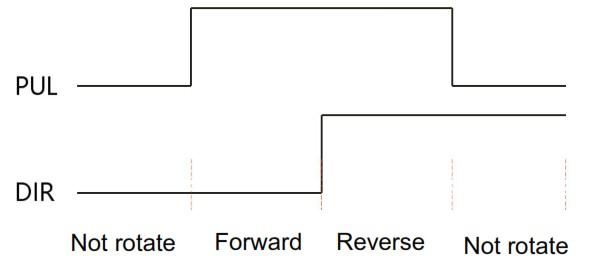 |
| 1. PUL on 和 DIR off 时,电机被触发正转。当 PUL 关闭时,电机减速并停止。 2. PUL on和DIR on时,触发电机反转。当PUL关闭时,电机减速停止。 3.PUL 关闭时,电机停止。 |
ENA 端口:启用/禁用
当内部光耦关闭时,驱动器向电机输出电流;
当内部光耦开启时,驱动器会切断电机各相电流,使电机自由,步进脉冲不响应。
当电机处于错误状态时,它会自动关闭。 使能信号的电平逻辑可以设置为相反。
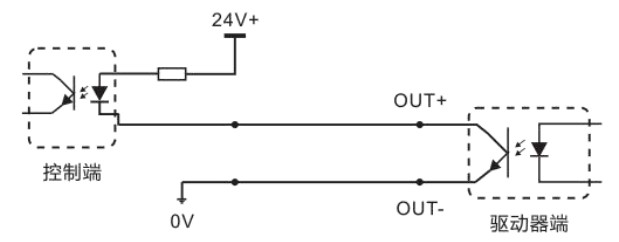
ALM端口:用于报警和到站输出。
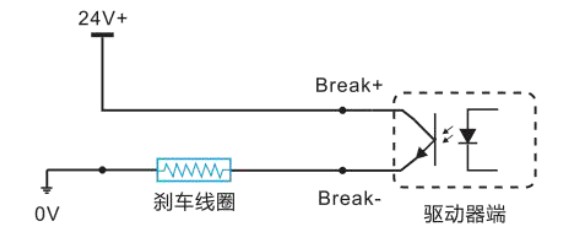
ALM 端口用于将驱动器的运行状态输出到外部控制电路。 当驱动器处于错误状态和正常工作状态时,ALM输出不同的光耦电平。 另外,ALM 可以通过软件调整作为刹车控制(刹车)信号,用于控制带刹车的步进伺服电机的刹车开关。 由于制动线圈为感性负载,电机运行时线圈发热严重,客户可根据需要选用专用的制动控制器,以减少制动发热,提高寿命和可靠性。
 Rtelligent 为专用制动控制器提供解决方案,例如amp文件如下:
Rtelligent 为专用制动控制器提供解决方案,例如amp文件如下:
RS232串口

| 序列号 | 象征 | 描述 |
| 1 | NC | |
| 2 | +5 伏 | 电源正极 |
| 3 | 发送端 | RS232发射端 |
| 4 | 地线 | 电源接地端 |
| 5 | 接收器 | RS232接收端 |
| 6 | NC |
拨码开关和运行参数的设置

SW6、SW7 未定义。
速度设定
| 速度 | SW1 | SW2 | SW3 | SW4 | 评论 |
| 100 | on | on | on | on | 其他速度可定制 |
| 150 | 离开 | on | on | on | |
| 200 | on | 离开 | on | on | |
| 250 | 离开 | 离开 | on | on | |
| 300 | on | on | 离开 | on | |
| 400 | 离开 | on | 离开 | on | |
| 500 | on | 离开 | 离开 | on | |
| 600 | 离开 | 离开 | 离开 | on | |
| 700 | on | on | on | 离开 | |
| 800 | 离开 | on | on | 离开 | |
| 900 | on | 离开 | on | 离开 | |
| 1000 | 离开 | 离开 | on | 离开 | |
| 1100 | on | on | 离开 | 离开 | |
| 1200 | 离开 | on | 离开 | 离开 | |
| 1300 | on | 离开 | 离开 | 离开 | |
| 1400 | 离开 | 离开 | 离开 | 离开 |
电机方向选择
DIP SW5 用于设置电机在初始脉冲下的运行方向。 “off”表示输入初始脉冲时电机方向为逆时针方向; “on”表示输入初始脉冲时电机方向为顺时针方向。
• 初始脉冲是开发驱动软件时使用的测试脉冲; 请以电机的实际运行方向为准。
开/闭环选择
DIP SW8 用于设置驱动器控制模式。
“off”表示闭环控制模式;
“on”表示开环控制模式,可用于测试电机。
驱动器工作状态LED指示
| LED 状态 | 司机状态 | |
| 绿色指示灯长亮 | 未启用驱动程序 | |
| 绿色指示灯闪烁 | 司机正常工作 | |
| 一个绿色指示灯和一个红色指示灯 | 驱动器过电流 | |
| 一个绿色指示灯和两个红色指示灯 | 驱动器输入功率过电压tage | |
| 一个绿色指示灯和三个红色指示灯 | 内部卷tag驱动程序的e是错误的 | |
| 一绿四红指示灯 | 跟踪误差超出限制 | |
| 一绿五红指示灯 | 编码器相位错误 | |
常见故障及排除方法
| 现象 | 可能的情况 | 解决方案 |
| 电机不工作 | 电源指示灯不亮 | 检查供电电路是否正常供电 |
| 电机转子被锁定但电机不工作 | 脉冲信号弱; 将信号电流增加到 7-16mA | |
| 速度太慢 | 选择正确的微步进 | |
| 司机受到保护 | 解决报警并重新上电 | |
| 启用信号问题 | 上拉或断开使能信号 | |
| 指令脉冲不正确 | 检查上位机是否有脉冲输出 | |
| 电机转向错误 | 电机旋转方向为反向 | 调整 DIP SW5 |
| 电机电缆断开 | 检查连接 | |
| 电机只有一个方向 | 脉冲模式错误或 DIR 端口损坏 | |
| 报警指示灯亮 | 电机连接错误 | 检查电机连接 |
| 电机接线和编码器接线错误 | 检查编码器连接顺序 | |
| 卷tage 太高或太低 | 检查电源 | |
| 位置或速度错误 | 信号受到干扰 | 消除干扰,可靠接地 |
| 命令输入不正确 | 检查上位机指令,确保输出正确 | |
| 每转脉冲设置错误 | 检查拨码开关状态并正确连接开关 | |
| 编码器信号异常 | 更换电机并联系制造商 | |
| 司机终端 | 端子间短路 | 检查电源极性或外部短路 |
| 烧起来了 | 端子间内阻过大 | 检查导线连接处是否因焊锡过多而产生焊球 |
| 电机超差 | 加减速时间太短 | 降低指令加速度或增加驱动过滤参数 |
| 电机扭矩过低 | 选择大扭矩的电机 | |
| 负载太重 | 检查负载重量和质量并调整机械结构 | |
| 电源电流过低 | 更换合适的电源 |
附录 A. 保证条款
A.1 保修期:12 个月
我们提供自交货之日起一年的质量保证,并在保修期内为我们的产品提供免费维修服务。
A.2 排除以下:
- 连接不当,如电源极性接反,接通电源时插拔电机连接。
- 超越电气和环境要求。
- 未经许可更改内部设备。
A.3 维护过程
产品维护,请按照以下步骤进行:
- 联系我们的客服人员获得返工许可。
- 货物附有司机故障现象的书面文件,以及寄件人的联系方式和邮寄方式。
邮寄地址:
邮政编码:
电话:
深圳科技网
文件/资源
 |
RTELLIGENT T60-IO 闭环步进驱动器 [pdf] 用户手册 T60-IO, 闭环步进驱动器, T60-IO 闭环步进驱动器 |



